
(Revoir l'article précédent : Réalisation et commande des ponts secteur avec un module Arduino #1)
Le matériel nécessaire

- Une carte de circuit imprimé
- Module Arduino Every
- Module A4988 (pilote pour moteur pas à pas)
- Résistances de 1,5 Kohms
- barrettes de connecteurs sécables mâle-mâle et mâle-femelle.
- Un ordinateur (PC ou Mac)
- un câble USB/Micro USB
Rappel du principe de fonctionnement
- Une alimentation unique : 12v 1A
- Deux fils par voie (led et bouton)
- un fil pour le commun
- Un fil pour la led warning (rouge clignotant)
- 4 fils pour la sortie moteur
La voie est sélectionnée par un bouton poussoir sur le TCO
Lors du déplacement du pont, la led rouge "Warning" clignote
Une fois en position, la led verte de la voie s'allume
La carte

- Support du module Arduino
- Support du module A4988
- Définition de la finesse du pas moteur
- Alimentation 12v, sortie moteur et entrée numérique
- Emplacement des résistances de protection
- Connexion des boutons poussoir et des led (un couple par position de voie)
- Led de contrôle de déplacement du pont secteur
- Le commun
Notes :
- Dans une version précédente, il était nécessaire de valider une position de départ (point zéro) pour assurer une bonne correspondance entre le déplacement et l'alignement avec la voie sélectionnée. Cette solution est remplacée par un mode de commande "réglage" qui permet de calibrer la position initiale. La sortie n'est donc plus utilisée.
- En bas à droite de la carte (entre l'entrée numérique et le point zéro), se trouve les emplacements prévus pour une commande DCC, non utilisé actuellement

En premier lieu, les résistances sont installées sur la carte.
La carte est identique pour tous les ponts secteurs, seul le nombre de voies diffère.
Ici il s'agit d'un des deux ponts à 4 voies, il n'y a donc que 6 résistances :
- 2 à droite pour la protection du commun et de la led "warning" (toujours présentes).
- 4 à gauche pour les voies,.


Des fiches sont également soudées pour l'ensemble des entrées et sorties, facilitant les interventions sur la carte sans avoir à la retournée côté piste.

Le module A4988 est un driver de moteurs pas à pas. Il est souvent utilisé dans les imprimantes 3D.
Donc facile à trouver et très bon marché.
Il gère totalement le moteur. Ce qui n’est pas rien puisque le contrôle d’un moteur pas à pas est assez complexe.
Ici, il suffit de lui indiquer le sens de rotation (DIR) et le pas (STEP). De plus il est capable de gérer des pas intermédiaires au-delà de ceux prévu par le moteur (initialement 1,8 degré par pas)
Ce qui serait insuffisant pour notre application. Grace à lui nous pouvons pousser jusqu’à 1/16e de pas !!!
Ce sont les broches MS1-> MS3 qui déterminent la résolution. (Tableau ci-après)
Finalement l’Arduino à simplement 3 informations à gérer : Le sens, le pas et le Enable (alimentation du moteur).
Logique du programme :
En fonction de la voie demandée (bouton appuyé) -> calcul du nombre de pas nécessaire et du sens de rotation pour atteindre la nouvelle position -> Pilotage du A4988 : Enable du moteur + Sens de rotation puis 1 impulsion par pas -> En fin de déplacement : Disable du moteur
Table programmation résolution moteur
| MS1 | MS2 | MS3 | Résolution Microstepping |
| Low | Low | Low | Pas complet (full step) |
| High | Low | Low | 1/2 pas |
| Low | High | Low | 1/4 de pas |
| High | High | Low | 1/8 ième de pas |
| High | High | High | 1/16 ième de pas |


Le chargement du programme

- compilation
- chargement des données




(Le fil de gauche est temporaire : il s'agit de la commande manuelle de test des différentes positions en attendant les commandes par bouton poussoir du TCO.)


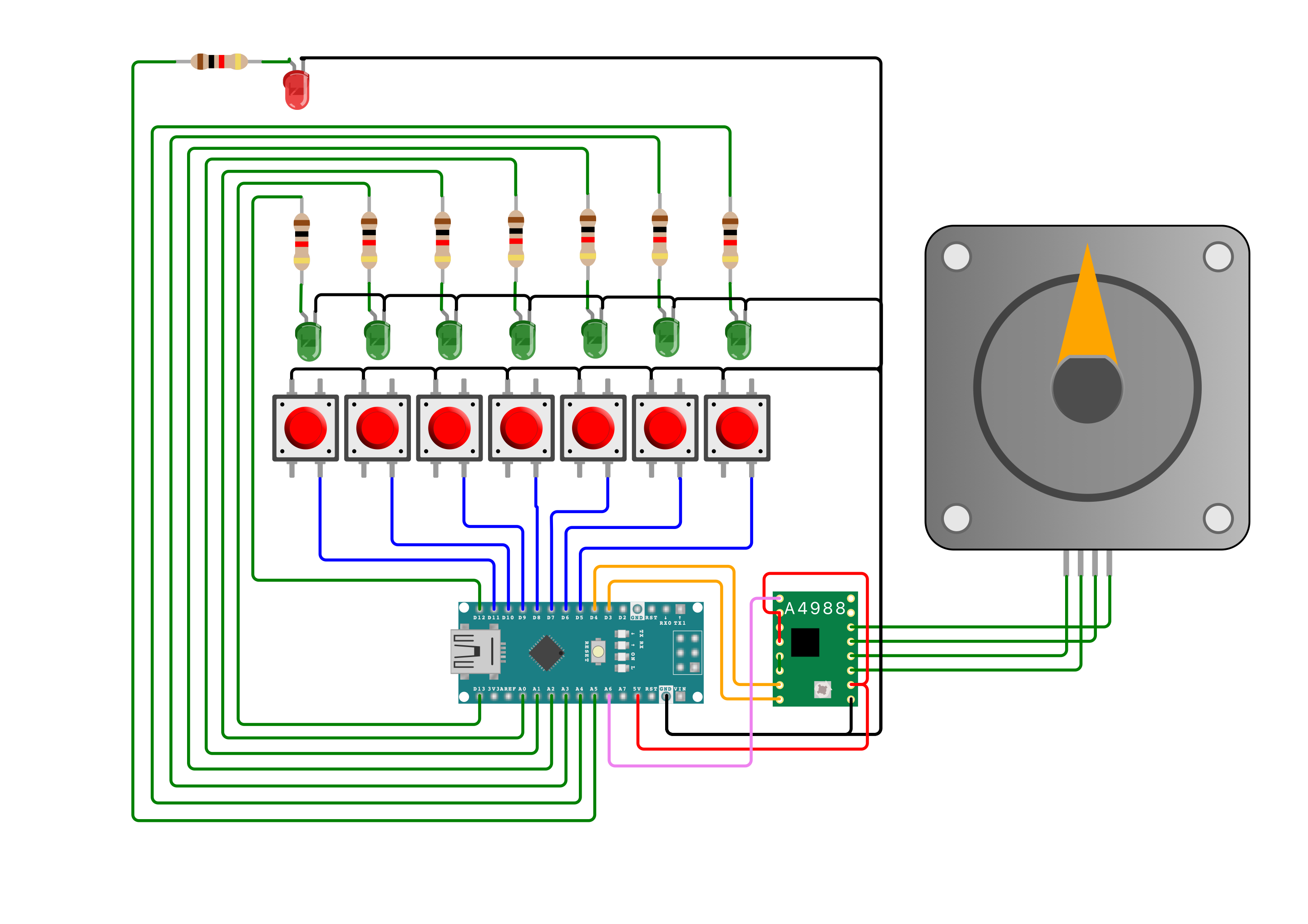
Schémas de principe de fonctionnement et schéma de câblage.

Dans un prochain article, nous détaillerons le programme et ses spécificités.
Le programme sera disponible en téléchargement!.
Aucun commentaire:
Enregistrer un commentaire